机器人干涉区的设置
以机器人和加工中心上下料为例,说明干涉区的设置步骤。
2.1设置步骤
示教器上点击“MENU”→“SETUP”→“Space fnct”,进入干涉区画面。
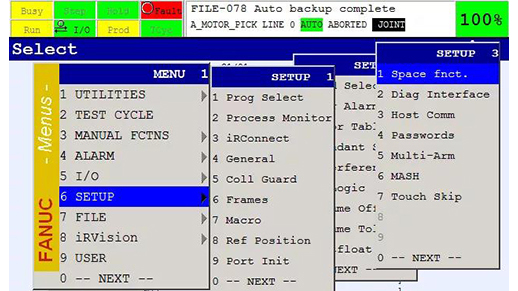
图1 干涉区选项
选择未被使用的干涉区,按下示教器“F3 DETAIL”,进入干涉区设置画面

图2 干涉区画面
在干涉区设置画面里,填入注释,相关的输入输出信号,按下“F2 空间”
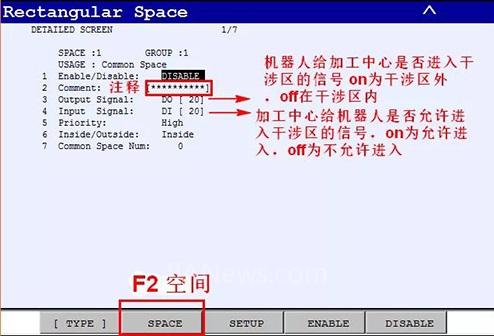
图3 干涉区设置画面
进入干涉区空间设置画面,将机器人运动到合适的干涉区起点,“SHIFT+F5 RECORD”记录下当前的工具坐标中心,以当前工具中心为起点,填入当前的用户坐标系的XYZ方向延伸的距离,形成一个空间。

图4 干涉区空间设置画面
按下“prev”返回干涉区设置画面,按下“F4 激活”,激活当前干涉区,完成设置
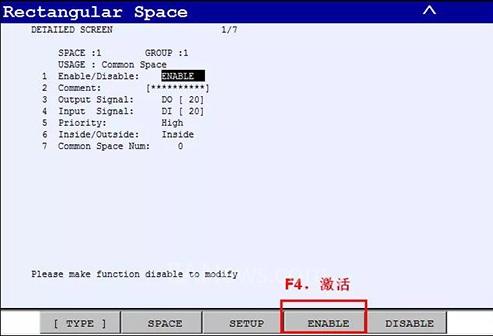
图5 干涉区激活设置画面
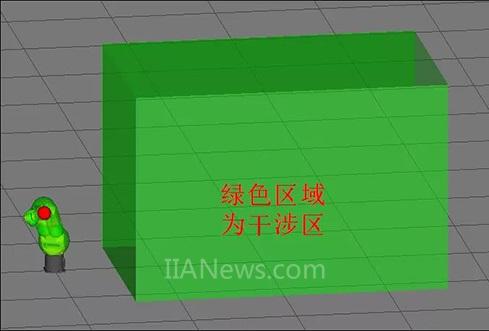
图6 干涉区模拟画面



 记住账号
记住账号



 在线咨询
在线咨询
 QQ咨询
QQ咨询

 18059884802
18059884802


