七轴工业机器人了解一下,为什么要发布七轴机械臂呢?
众所周知,很多机器人公司都推出了七轴机械臂,(如下图):
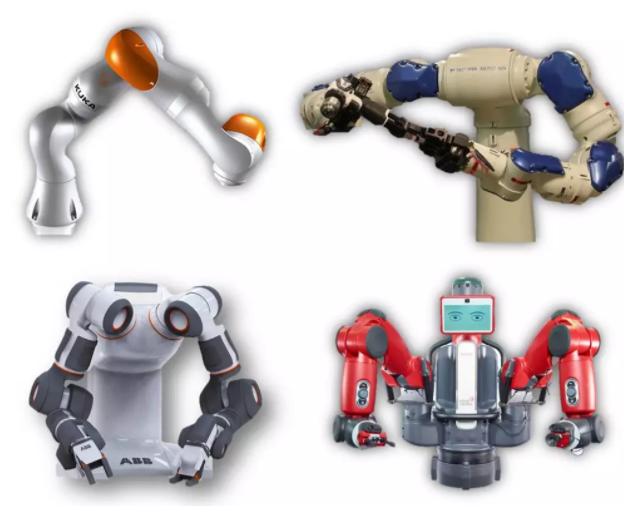
为什么要发布七轴机械臂呢?原因很简单,就是六轴不够用了。
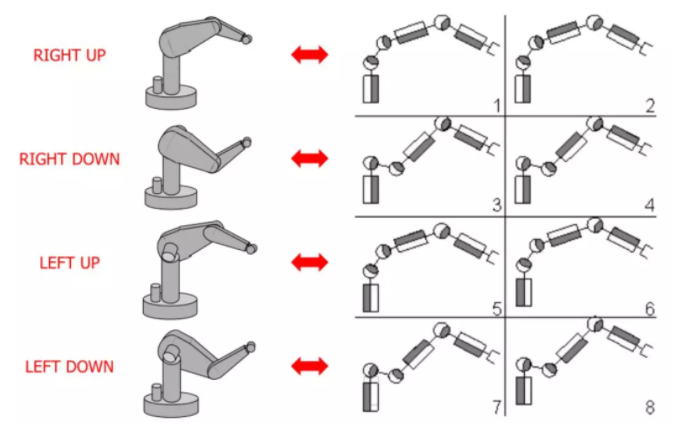
又众所周知,一般六轴机械臂的一个末端姿态会对应几组不同的逆解。但是,这几组逆解在构形空间内是离散分布的,一般情况下无法在保证末端位姿的情况下从一组逆解变换到另一组逆解:
换句话说,让机器人末端走一条固定轨迹,如果两个点中间存在一些不可通过的点(障碍物,奇异点之类),那么六轴机械臂是无法完成这条轨迹的。
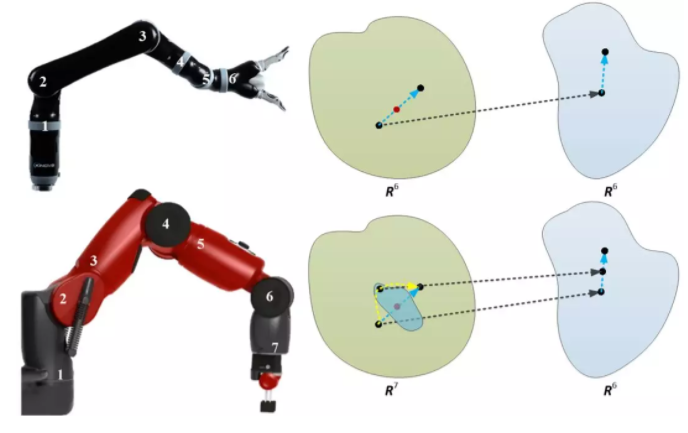
但是,对于七轴机械臂的话,它多了一个冗余自由度,存在无数组在构形空间内连续的逆解,换句话说,有可能在保证末端轨迹的同时避开奇异的和障碍物。
对于为什么不做八轴、九轴机械臂,答案也很简单,七轴大部分情况下已经够用了,增加关节只会降低整个机构的刚度。
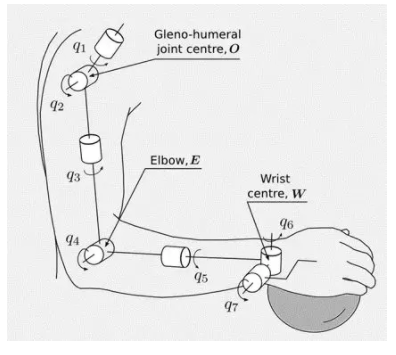
简言之,七轴机械臂是兼顾柔性与刚度的一种构型。巧的是,人的手臂也是七自由度的。
于是,我们会有另一个问题:为什么大家不一开始就做七轴,而大多是以六轴起步呢?原因大概是因为以前大家认为七轴机械臂的运动学不存在解析解吧。
我们知道,机器人的底层控制器是需要实时的进行轨迹插补的,如果是对末端轨迹进行插补,就需要在一个伺服周期(<1ms)内多次计算运动学逆解。
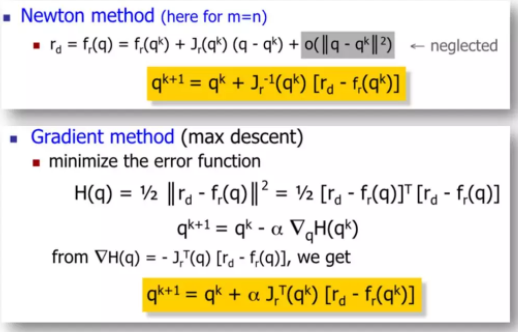
对于串联机械臂,我们学术上或许可以采用各种基于雅可比迭代的数值解法:
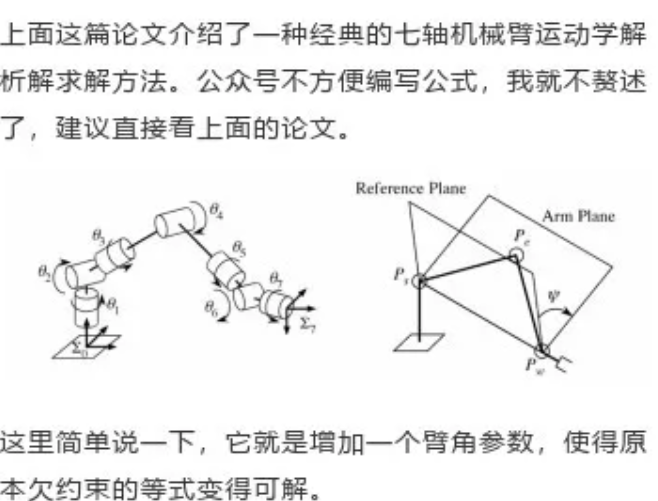


通过调整臂角,我们可以在保持末端不动的情况下切换不同逆解:

保持末端轨迹的同时避开障碍物:

或者是,避开关节极限:




 记住账号
记住账号



 在线咨询
在线咨询
 QQ咨询
QQ咨询

 2778087246
2778087246 18150367963
18150367963


